BMRPP: Blockchain-based Multi-Robot Path Planning
-
START DATE
1 Sep, 2018
-
END DATE
31 Aug, 2019
DETAILS
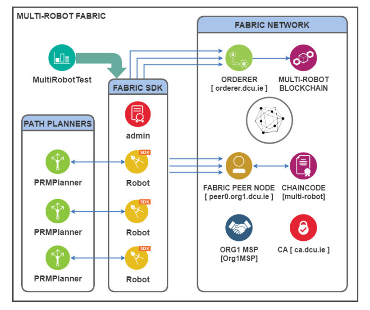
The blockchain is a secure and trustworthy distributed transaction management system that is being extensively researched and developed for various applications and use cases. We introduce a novel distributed control system using the Blockchain. A multi-robot path planning application was developed and deployed to benchmark a blockchain platform, the Hyperledger Fabric. Blockchain technology has the reputation of being sufficiently dilatory that it is inappropriate for time-sensitive applications. This research demonstrates how enterprise-grade blockchain solutions overcome this shortcoming and investigates their potential for enabling secure and trusted distributed control systems for IoT.
Students(s): Amr Mokhtar
Publications
- Mokhtar, Amr, Noel Murphy, and Jennifer Bruton. “Blockchain-based multi-robot path planning.” In 2019 IEEE 5th World Forum on Internet of Things (WF-IoT), pp. 584-589. IEEE, 2019.